We introduce DisCo, a distributed algorithm for contact-rich,
multi-robot tasks, which leverages contact-implicit
trajectory optimization to enable a group of robots to
collaborate through contact in tasks such as collaborative
manipulation, robot team sports, and modular robot locomotion.
We build our algorithm on a variant of the Alternating Direction
Method of Multipliers (ADMM), where each robot computes its
own contact forces and contact-switching events from a smaller
single-robot, contact-implicit trajectory optimization problem,
while cooperating with other robots through dual variables,
enforcing constraints between robots. Each robot iterates
between solving its local problem, and communicating over a
wireless mesh network to enforce these consistency constraints
with its neighbors, ultimately converging to a coordinated
plan for the group. The local problems solved by each
robot are significantly less challenging than a centralized
problem with all robots' contact forces and switching events,
improving the computational efficiency, while also preserving
the privacy of some aspects of each robot's operation.
We demonstrate the effectiveness of our algorithm in
simulations of collaborative manipulation, multi-robot
team sports scenarios, and in modular robot locomotion,
where DisCo achieves 3x higher success rates
with a 2.5x to 5x faster computation time. Further, we
provide results of hardware experiments on a modular truss
robot, with three collaborating truss nodes planning
individually while working together to produce a punctuated
rolling-gate motion of the composite structure.
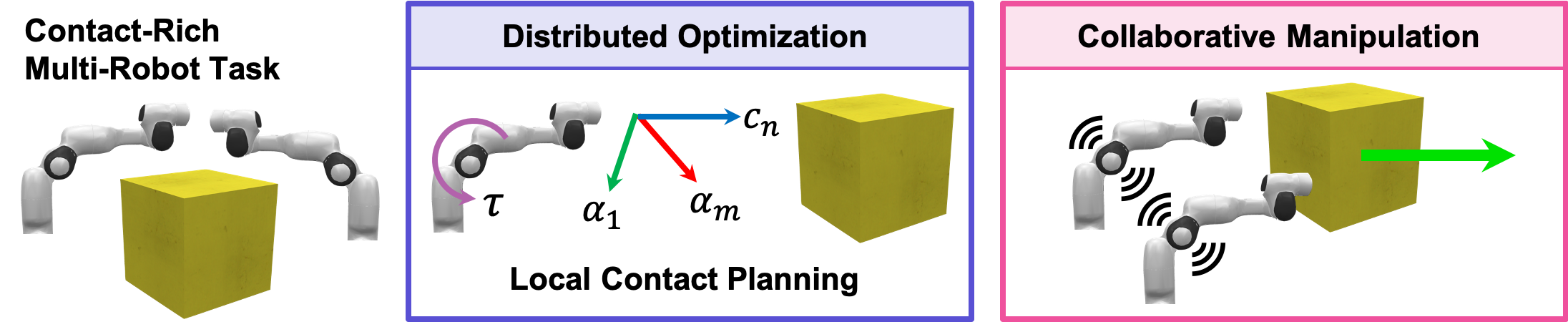
 Our algorithm,
DisCo,
is amenable to a broad class of collaborative
multi-robot problems involving contact,
such as: (Left) collaborative manipulation,
e.g., of a table; (Center) robot team sports,
e.g., robot soccer;
and (Right) locomotion of modular robots.
In each scenario, each robot solves a local
contact-implicit trajectory optimization problem
to complete the task in collaboration with other
robots.
Our algorithm,
DisCo,
is amenable to a broad class of collaborative
multi-robot problems involving contact,
such as: (Left) collaborative manipulation,
e.g., of a table; (Center) robot team sports,
e.g., robot soccer;
and (Right) locomotion of modular robots.
In each scenario, each robot solves a local
contact-implicit trajectory optimization problem
to complete the task in collaboration with other
robots.